The Challenge
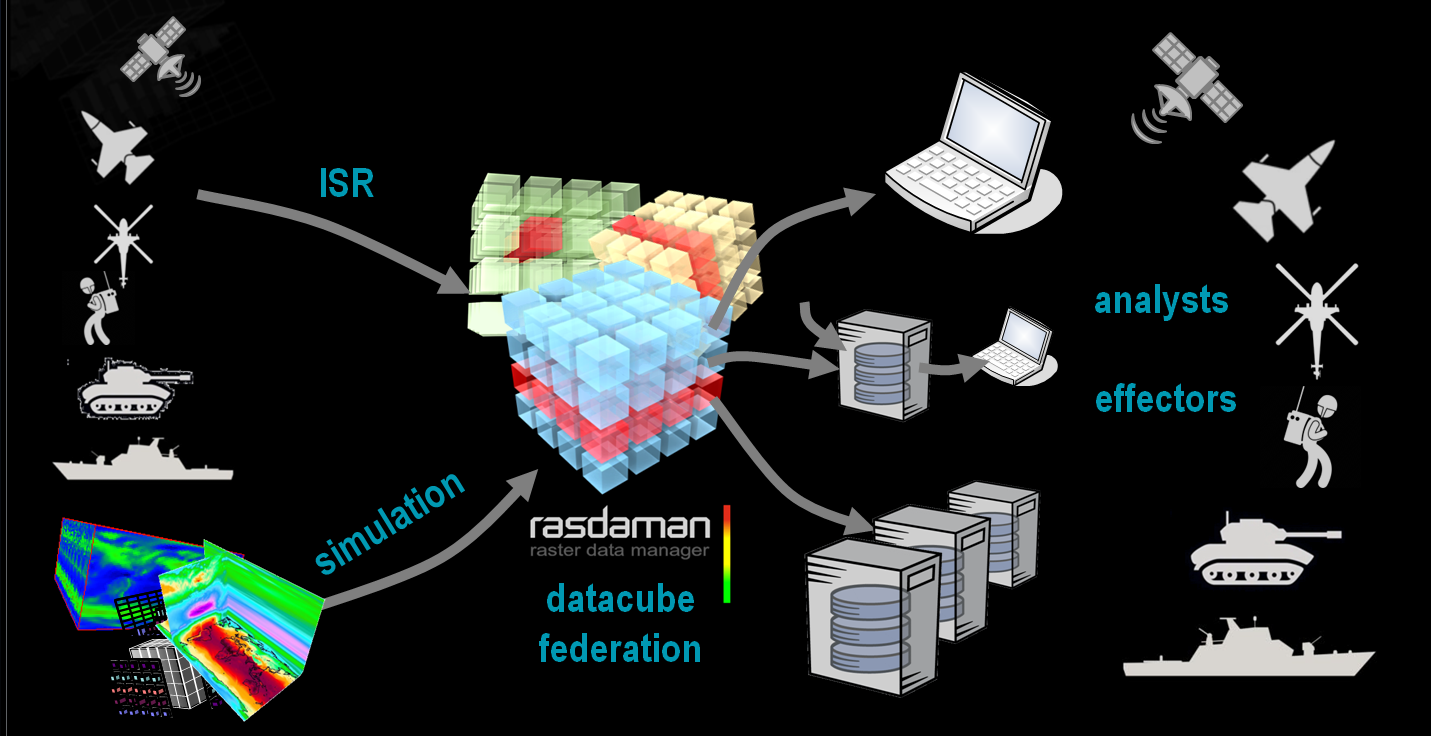
A common integrated Recognized Environmental Picture needs a multitude of disparate, heterogeneous sensor information.
Oftentimes, it is not sufficient to look at just one sensor, rather data from different (cloud and edge) sources need to be pulled together dynamically.
Conversely, edge devices may require instantaneous information without the need for complex data download and combination.
In short: Edge devices must be integrated seamlessly into the mash-up of data sources and sinks for "any query, any time, from & to any device".

"The key is breaking down silos by connecting disparate military systems with commercial satellite networks, at scale",
says Dawna Morningstar, director of NextGen Solutions and Advanced Communications at Lockheed Martin Space.
Capability Demonstration
In the Cube4EnvSec capability demonstrations, drones and ships have been federated with large-scale archives for ad-hoc data mixing. In another project, datacube queries have been demonstrated successfully in-orbit on an ESA nanosat.



Ship Data Integration
In May 2024, the GINR Sanna research vessel left Nuuk / Greenland harbour for a special cruise. On board was a local server collecting sonar data into an onboard bathymetry datacube. Via federation, realtime comparison was possible of the Nuuk service's model bathymetry and CoperniCUBE.
Air Drone Data Integration
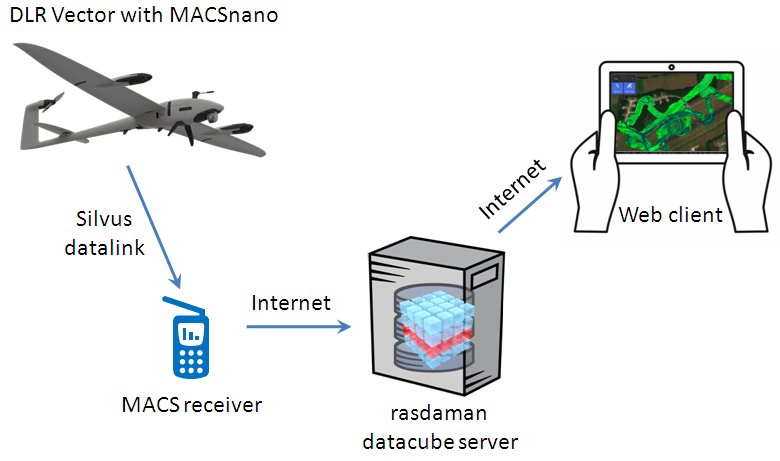
- DLR Vector drone with MACSnano camera flies over Lt General Best Barracks airfield, as part of the NATO C-UAS Exercise 2022.
- Drone flies various courses, transmitting a 2cm georeferenced image via 5G to the DLR image server.
- DLR image server forwards data to the rasdaman datacube server for incrementally building up the map.
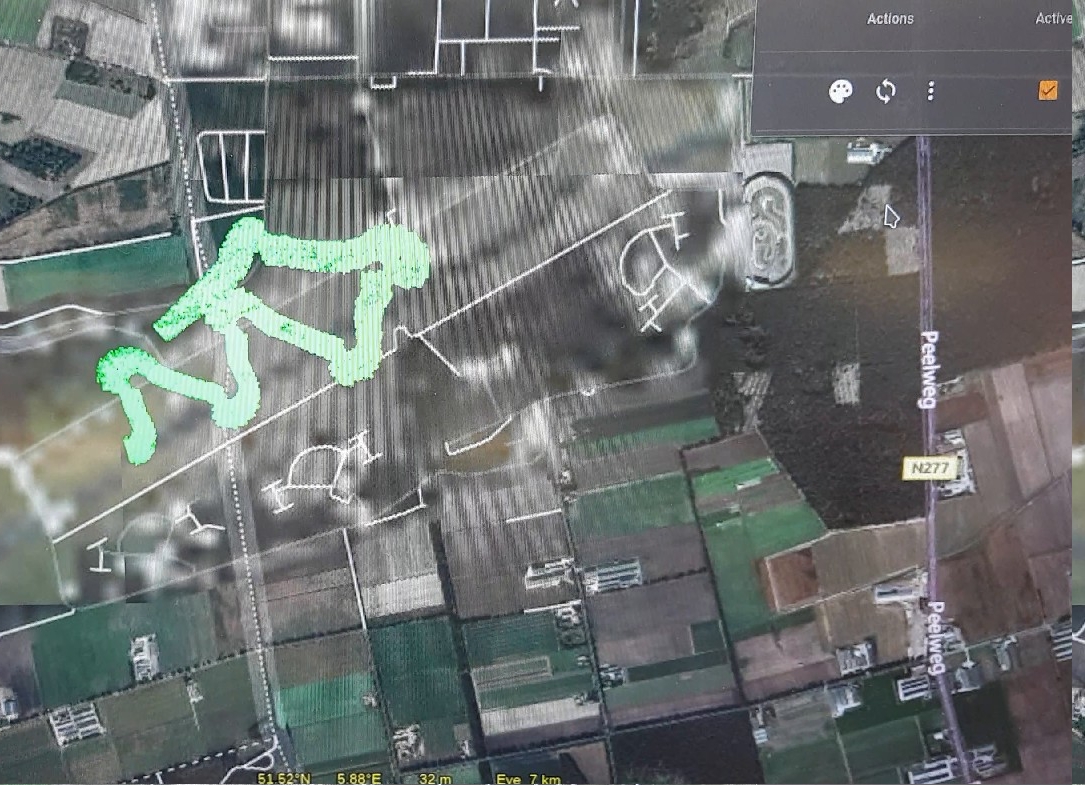
- For presentation in the exercise tent, the rasdaman WMS delivers a progressively extending map - in RGB and, to show some processing on-the-fly, as GRVI (Green-Red Vegetation Index).
- 10m Sentinel-2 hyperspectral data and ICEYE SAR imagery were combined additionally, showing the capability of merging data from different sources in realtime.
- The complete pipeline from drone to server to presentation screen in the tent incurred a latency of 3-5 seconds.
Exercise Impressions








Client Screenshots




Videos
Drone path, RGB
Drone path, on-the-fly GRVI
Drone path, with Sentinel-2 and ICEYE SAR
User Benefit
- enhanced availability of geo data for GEOINT and C4ISR
- IoT integration with access to any data, at any time, from anywhere - fixed or moving
- ad-hoc data fusion, no need for software adaptation to heterogeneous multi-source data input
- efficient cloud/edge computing: optimized mixed processing for lowest latency